Closed loop buck
After the open-loop mode, the aim of this tutorial is to show you how you can implement a buck voltage control using simulink and owntech library.
You can delete all the data store variable related to the duty_cycle that we have created in the open loop section. Enter inside the block closed_loop_task, and with the association of the block “constant”, “sum” and “discrete PID controller” from the simulink library, set leg duty and get data from owntech library you can create the following schema :
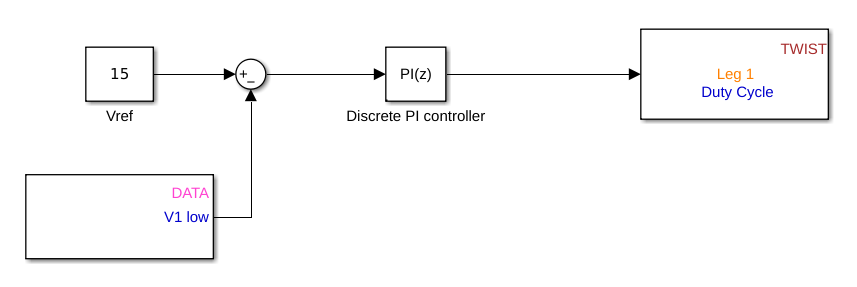
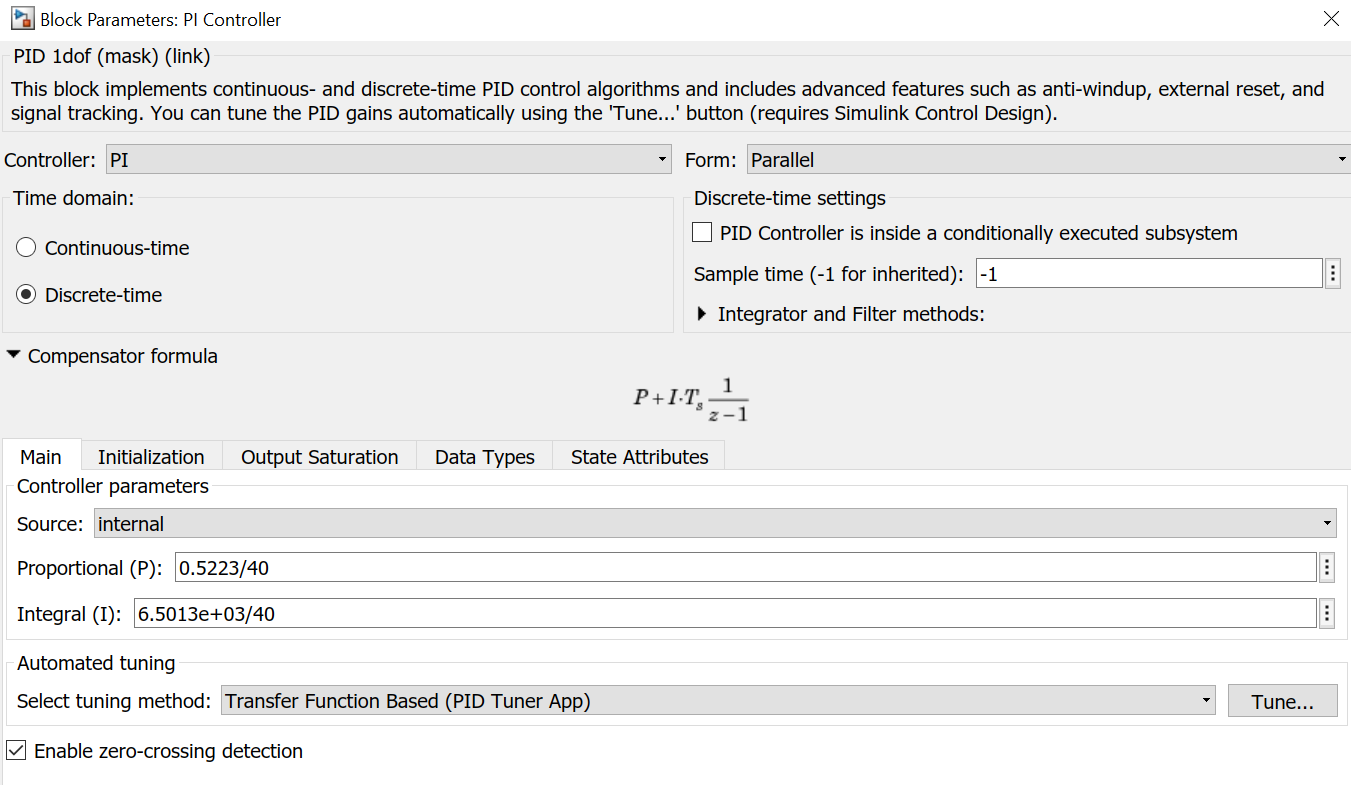
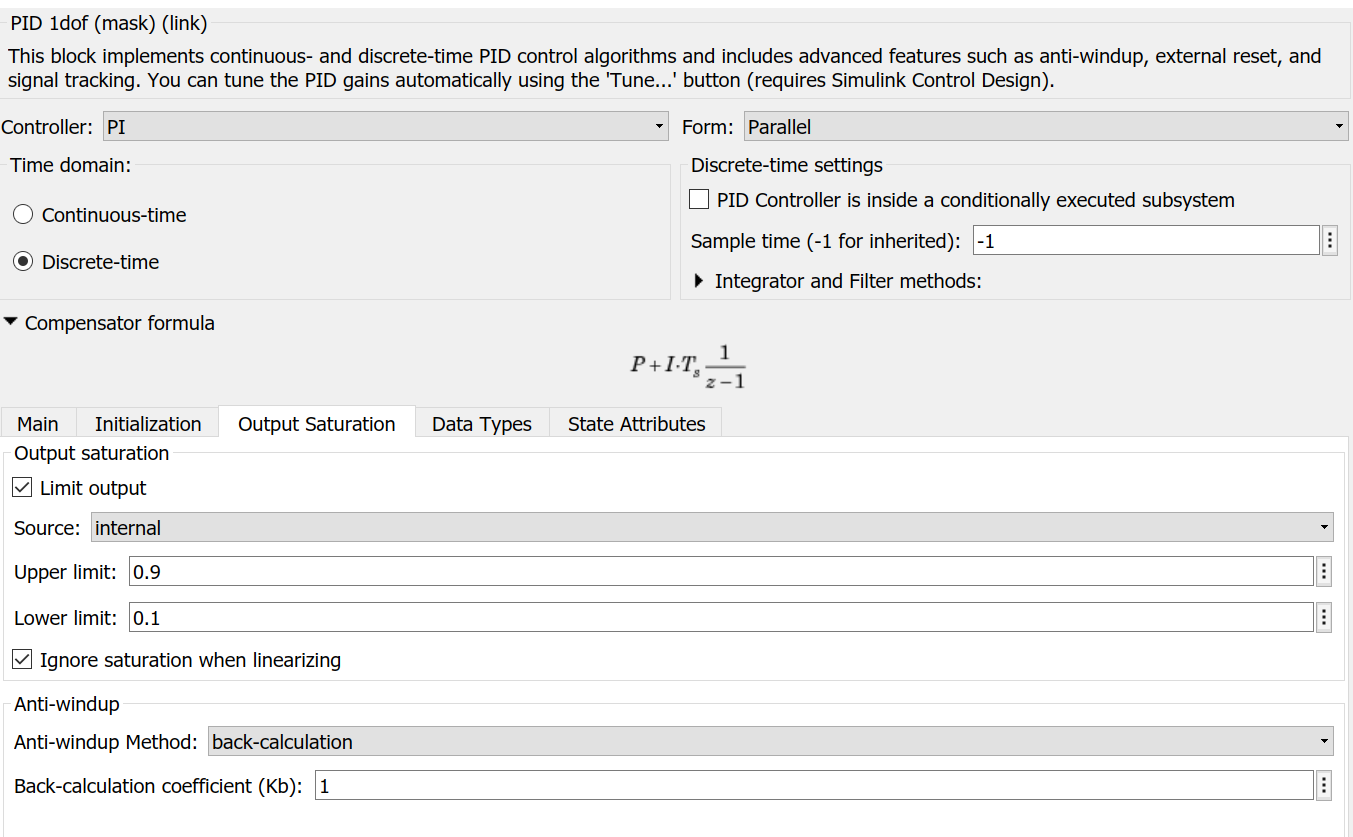
We are fixing the output voltage to 15 volt, as for the PI paramters you should have the same as below :
Then generate the code, matlab will upload it automatically to the board :

Finally, switch to ownplot, open the correct port and send the matlab_mode to execute the generated code :
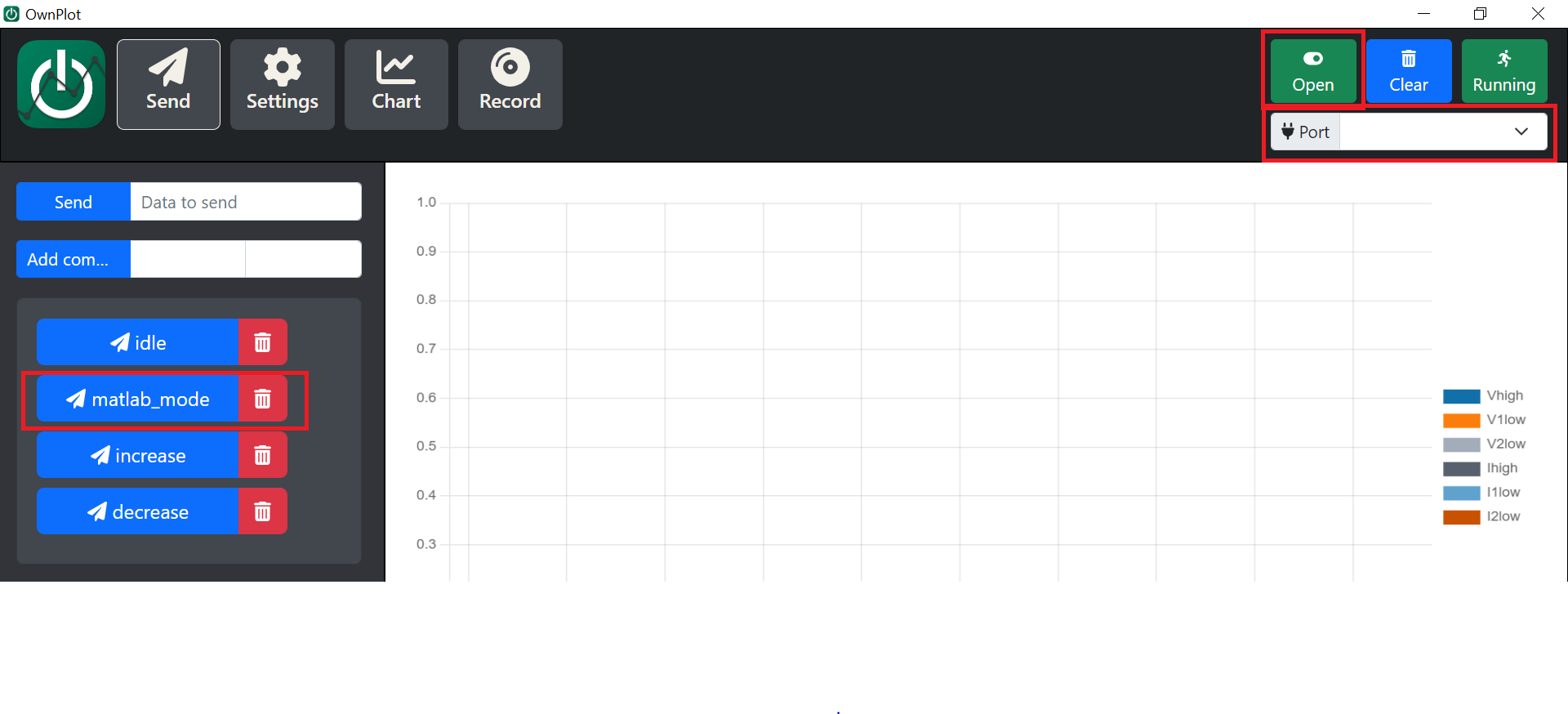
When enabling the matlab_mode, the output voltage will be fixed to 15V.